#include <kuka_api.h>
Attributs Publics | |
| kukaReal_t | a1 |
| kukaReal_t | a2 |
| kukaReal_t | a3 |
| kukaReal_t | a4 |
| kukaReal_t | a5 |
| kukaReal_t | a6 |
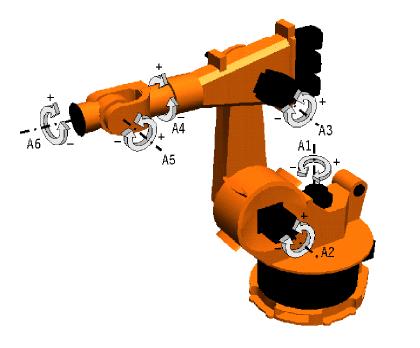
Structure permettant de décrire une position spécifique aux axes. Ici, comme chaque axe est un pivot, les composantes de cette structure sont des angles.
|
|
Rotation autour de l'axe 1 |
|
|
rotation autour de l'axe 2 |
|
|
rotation autour de l'axe 3 |
|
|
rotation autour de l'axe 4 |
|
|
rotation autour de l'axe 5 |
|
|
rotation autour de l'axe 6 |